
หมวดหมู่สินค้า
- FM Transmitter
- 0-50w 50w-1000w 2kw-10kw 10kw +
- เครื่องส่งสัญญาณโทรทัศน์
- 0-50w 50-1kw 2kw-10kw
- เสาอากาศ FM
- เสาอากาศทีวี
- อุปกรณ์เสริมเสาอากาศ
- สายเคเบิล เชื่อมต่อ เพาเวอร์ Splitter โหลด dummy
- RF ทรานซิสเตอร์
- พาวเวอร์ซัพพลาย
- อุปกรณ์เครื่องเสียง
- DTV Front End อุปกรณ์
- ระบบการเชื่อมโยง
- ระบบ STL เชื่อมโยงระบบไมโครเวฟ
- วิทยุเอฟเอ็ม
- เครื่องวัดพลังงาน
- ผลิตภัณฑ์อื่น
- พิเศษสำหรับ Coronavirus
ผลิตภัณฑ์แท็ก
ไซต์ Fmuser
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> แอฟริคานส์
- sq.fmuser.net -> แอลเบเนีย
- ar.fmuser.net -> ภาษาอาหรับ
- hy.fmuser.net -> อาร์เมเนีย
- az.fmuser.net -> อาเซอร์ไบจัน
- eu.fmuser.net -> บาสก์
- be.fmuser.net -> เบลารุส
- bg.fmuser.net -> บัลแกเรีย
- ca.fmuser.net -> คาตาลัน
- zh-CN.fmuser.net -> ภาษาจีน (ประยุกต์)
- zh-TW.fmuser.net -> ภาษาจีน (ดั้งเดิม)
- hr.fmuser.net -> โครเอเชีย
- cs.fmuser.net -> เช็ก
- da.fmuser.net -> เดนมาร์ก
- nl.fmuser.net -> ดัตช์
- et.fmuser.net -> เอสโตเนีย
- tl.fmuser.net -> ฟิลิปปินส์
- fi.fmuser.net -> ฟินแลนด์
- fr.fmuser.net -> ฝรั่งเศส
- gl.fmuser.net -> กาลิเซีย
- ka.fmuser.net -> จอร์เจีย
- de.fmuser.net -> เยอรมัน
- el.fmuser.net -> กรีก
- ht.fmuser.net -> ชาวเฮติครีโอล
- iw.fmuser.net -> ภาษาฮิบรู
- hi.fmuser.net -> ภาษาฮินดี
- hu.fmuser.net -> ฮังการี
- is.fmuser.net -> ไอซ์แลนด์
- id.fmuser.net -> ชาวอินโดนีเซีย
- ga.fmuser.net -> ไอริช
- it.fmuser.net -> อิตาเลี่ยน
- ja.fmuser.net -> ภาษาญี่ปุ่น
- ko.fmuser.net -> ภาษาเกาหลี
- lv.fmuser.net -> ลัตเวีย
- lt.fmuser.net -> ลิทัวเนีย
- mk.fmuser.net -> มาซิโดเนีย
- ms.fmuser.net -> มาเลย์
- mt.fmuser.net -> มอลตา
- no.fmuser.net -> นอร์เวย์
- fa.fmuser.net -> เปอร์เซีย
- pl.fmuser.net -> โปแลนด์
- pt.fmuser.net -> โปรตุเกส
- ro.fmuser.net -> โรมาเนีย
- ru.fmuser.net -> รัสเซีย
- sr.fmuser.net -> เซอร์เบีย
- sk.fmuser.net -> สโลวัก
- sl.fmuser.net -> สโลวีเนีย
- es.fmuser.net -> สเปน
- sw.fmuser.net -> ภาษาสวาฮิลี
- sv.fmuser.net -> สวีเดน
- th.fmuser.net -> ไทย
- tr.fmuser.net -> ตุรกี
- uk.fmuser.net -> ยูเครน
- ur.fmuser.net -> ภาษาอูรดู
- vi.fmuser.net -> เวียดนาม
- cy.fmuser.net -> เวลส์
- yi.fmuser.net -> ยิดดิช
การมอดูเลตเฟส: ทฤษฎี, โดเมนเวลา, โดเมนความถี่
การปรับคลื่นความถี่วิทยุ
การมอดูเลตเฟสนั้นคล้ายคลึงกับการมอดูเลตความถี่และเป็นเทคนิคที่สำคัญในระบบการสื่อสารแบบดิจิตอล
เราทุกคนเคยได้ยินวิทยุ AM และวิทยุ FM แต่การปรับเฟสดูเหมือนจะอยู่ในหมวดหมู่อื่น -“ วิทยุ PM” นั้นไม่ได้เป็นคำทั่วไป ปรากฎว่าการมอดูเลตเฟสนั้นมีความเกี่ยวข้องมากขึ้นในบริบทของ RF แบบดิจิทัล
อย่างไรก็ตามในบางกรณีเราสามารถพูดได้ว่าวิทยุ PM นั้นเป็นเรื่องธรรมดาเหมือนกับวิทยุ FM เพราะมีความแตกต่างเล็กน้อยระหว่างการมอดูเลตเฟสและการมอดูเลตความถี่ FM และ PM นั้นถือว่าดีที่สุดเป็นสองตัวแปรที่เกี่ยวข้องอย่างใกล้ชิดของการปรับมุมที่ "มุม" หมายถึงการปรับเปลี่ยนปริมาณที่ส่งผ่านไปยังฟังก์ชั่นไซน์หรือโคไซน์
คณิตศาสตร์
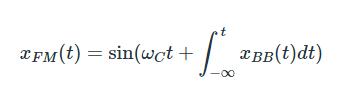
เราเห็นในหน้าก่อนหน้านี้ว่าการมอดูเลตความถี่ทำได้โดยการเพิ่มอินทิกรัลของสัญญาณเบสแบนด์เข้ากับอาร์กิวเมนต์ของฟังก์ชันไซน์หรือโคไซน์ (โดยที่ฟังก์ชันไซน์หรือโคไซน์แทนพาหะ):
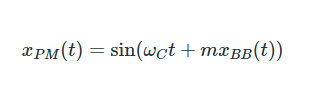
เช่นเดียวกับการมอดูเลตความถี่เราสามารถใช้ดัชนีการมอดูเลตเพื่อทำให้การแปรผันของเฟสมีความอ่อนไหวต่อการเปลี่ยนแปลงของค่าเบสแบนด์:
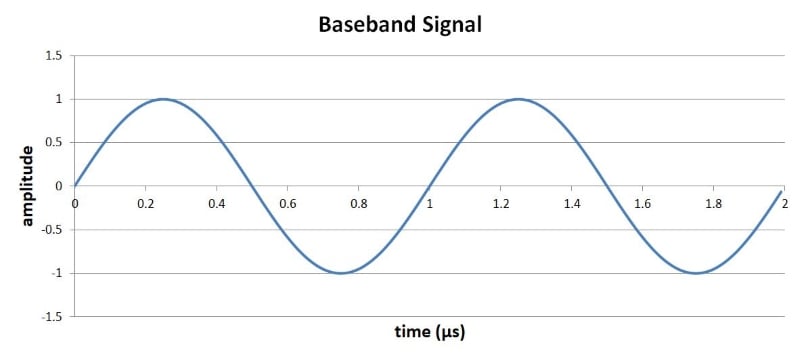
ความคล้ายคลึงกันระหว่างการมอดูเลตเฟสและการมอดูเลตความถี่จะชัดเจนถ้าเราพิจารณาสัญญาณเบสแบนด์ความถี่เดียว สมมุติว่า xBB (t) = sin (ωBBt)
อินทิกรัลของไซน์คือลบโคไซน์ (บวกค่าคงที่ซึ่งเราสามารถเพิกเฉยได้ที่นี่) - กล่าวอีกนัยหนึ่งอินทิกรัลคือสัญญาณดั้งเดิมที่เลื่อนเวลา
ดังนั้นถ้าเราทำการมอดูเลตเฟสและการมอดูเลตความถี่ด้วยสัญญาณเบสแบนด์นี้ความแตกต่างเพียงอย่างเดียวของรูปคลื่นที่ได้รับการปรับจะเป็นการจัดตำแหน่งระหว่างค่าเบสแบนด์และการแปรผันในพาหะ รูปแบบที่เหมือนกัน สิ่งนี้จะชัดเจนยิ่งขึ้นในส่วนถัดไปซึ่งเราจะดูที่แปลงเวลาโดเมน
โปรดทราบว่าเรากำลังเผชิญกับช่วงเวลาทันทีเช่นเดียวกับการปรับความถี่ตามแนวคิดของความถี่ทันที คำว่า "เฟส" ค่อนข้างคลุมเครือ หนึ่งความหมายที่คุ้นเคยหมายถึงสถานะเริ่มต้นของไซนัส ตัวอย่างเช่นคลื่นไซน์“ ปกติ” เริ่มต้นด้วยค่าศูนย์แล้วเพิ่มค่าไปยังค่าสูงสุด คลื่นไซน์ที่เริ่มต้นที่จุดอื่นในวัฏจักรนั้นมีเฟสออฟเซ็ต เราสามารถนึกถึงเฟสว่าเป็นส่วนเฉพาะของวัฏจักรรูปแบบเต็ม เช่นที่เฟสπ / 2 ไซน์ไซด์ได้เสร็จหนึ่งในสี่ของวัฏจักรของมัน
การตีความ“ เฟส” เหล่านี้ไม่ได้ช่วยเรามากนักเมื่อเราจัดการกับเฟสที่แตกต่างกันอย่างต่อเนื่องเพื่อตอบสนองต่อรูปคลื่นของคลื่นความถี่ แต่เราใช้แนวคิดของเฟสทันทีเช่นเฟสในช่วงเวลาที่กำหนดซึ่งสอดคล้องกับค่าที่ส่งผ่าน (ในช่วงเวลาที่กำหนด) ไปยังฟังก์ชันตรีโกณมิติ เราสามารถนึกถึงการแปรผันอย่างต่อเนื่องเหล่านี้ในเฟสทันทีว่า“ ผลักดัน” ค่าของผู้ให้บริการที่อยู่ห่างจากหรือใกล้เคียงกับสถานะก่อนหน้าของรูปคลื่น
สิ่งที่ควรทราบอีกประการหนึ่งคือฟังก์ชัน Trig รวมถึงไซน์และโคไซน์ทำงานในมุมต่างๆ การเปลี่ยนอาร์กิวเมนต์ของฟังก์ชั่นตรีโกณฯ เทียบเท่ากับการเปลี่ยนมุมและสิ่งนี้อธิบายได้ว่าเหตุใดทั้ง FM และ PM จึงถูกอธิบายว่าเป็นการปรับมุม
โดเมนเวลา
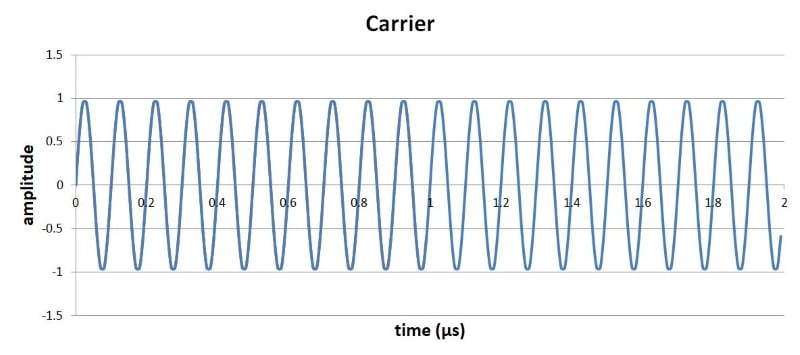
เราจะใช้รูปแบบของคลื่นเดียวกับที่เราใช้สำหรับการสนทนา FM เช่นผู้ให้บริการ 10 MHz และสัญญาณเบสแบนด์ 1 ไซน์ไซน์:
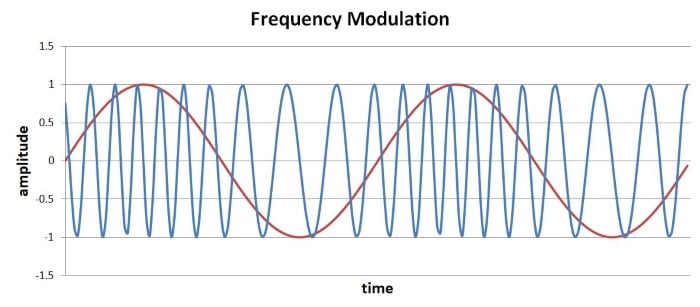
นี่คือรูปแบบคลื่น FM (ที่มี m = 4) ที่เราเห็นในหน้าก่อนหน้า:
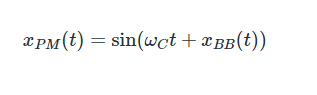
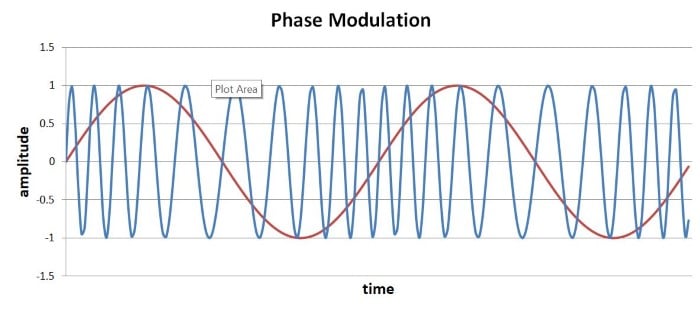
เราสามารถคำนวณรูปคลื่น PM ได้โดยใช้สมการต่อไปนี้ซึ่งสัญญาณที่เพิ่มเข้ามาในการโต้แย้งของคลื่นพาหะใช้ไซน์บวก (เช่นสัญญาณดั้งเดิม) แทนที่จะเป็นลบโคไซน์ (เช่นอินทิกรัลของสัญญาณดั้งเดิม)

นี่คือพล็อต PM:
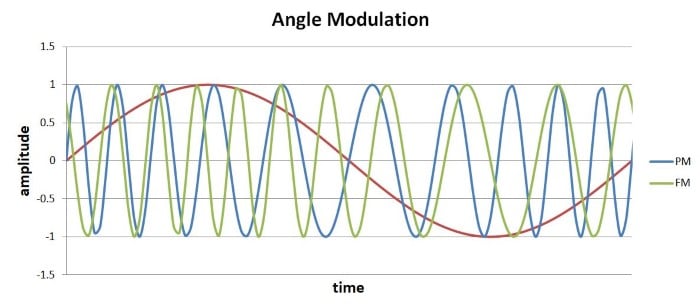
ก่อนที่เราจะพูดถึงเรื่องนี้เรามาดูพล็อตที่แสดงรูปคลื่น FM และรูปคลื่น PM:
สิ่งแรกที่นึกถึงคือจากมุมมองของภาพ FM นั้นใช้งานง่ายกว่า PM - มีการเชื่อมต่อภาพที่ชัดเจนระหว่างส่วนสูง - และ - ความถี่ต่ำของรูปคลื่นที่ปรับและค่าเบสแบนด์สูงและต่ำ
ด้วย PM ความสัมพันธ์ระหว่างรูปแบบคลื่นเบสแบนด์และพฤติกรรมของผู้ให้บริการอาจไม่ชัดเจนในทันที อย่างไรก็ตามหลังจากการตรวจสอบเล็กน้อยเราจะเห็นได้ว่าความถี่ของผู้ให้บริการ PM นั้นสอดคล้องกับความชันของรูปคลื่นสัญญาณเบสแบนด์ ส่วนความถี่สูงสุดเกิดขึ้นระหว่างความชันเชิงบวกที่ชันที่สุดของ xBB และส่วนความถี่ต่ำสุดเกิดขึ้นในระหว่างความชันเชิงลบที่ชันที่สุด
สิ่งนี้สมเหตุสมผล: ระลึกว่าความถี่ (เป็นฟังก์ชันของเวลา) คืออนุพันธ์ของเฟส (เป็นฟังก์ชันของเวลา) ด้วยการมอดูเลตเฟสความชันของสัญญาณเบสแบนด์จะควบคุมความเร็วของเฟสที่เปลี่ยนแปลงและอัตราการเปลี่ยนเฟสนั้นเทียบเท่ากับความถี่
ดังนั้นในรูปแบบของคลื่น PM ความชันเบสแบนด์สูงสอดคล้องกับความถี่สูงและความชันเบสแบนด์ต่ำสอดคล้องกับความถี่ต่ำ ด้วยการมอดูเลตความถี่เราใช้อินทิกรัลของ xBB ซึ่งมีผลในการเปลี่ยนส่วนของคลื่นพาหะความถี่สูง (หรือต่ำ) ไปเป็นค่าเบสแบนด์ตามค่าความชันสูง
โดเมนความถี่
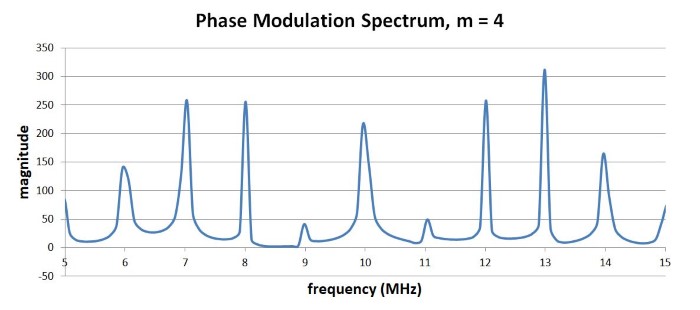
พล็อตโดเมนเวลาก่อนหน้านี้แสดงให้เห็นถึงสิ่งที่กล่าวไว้ก่อนหน้านี้: การปรับความถี่และการมอดูเลตเฟสนั้นค่อนข้างคล้ายกัน ดังนั้นจึงไม่น่าแปลกใจที่ผลกระทบของ PM ในโดเมนความถี่จะคล้ายกับของ FM ต่อไปนี้เป็นสเปกตรัมสำหรับการมอดูเลตเฟสด้วยสัญญาณพาหะและสัญญาณเบสแบนด์ที่ใช้ด้านบน:
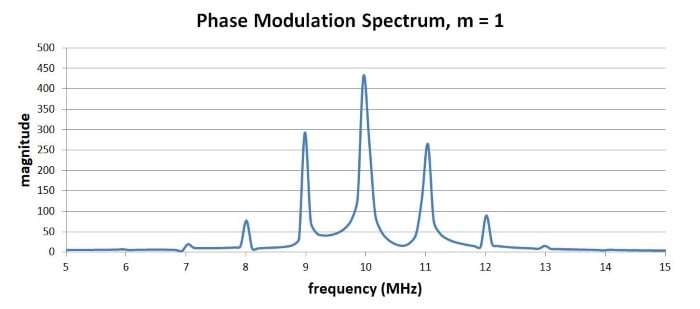
* การมอดูเลตเฟสถูกคำนวณโดยการเพิ่มสัญญาณเบสแบนด์ไปยังอาร์กิวเมนต์ของฟังก์ชันไซน์หรือโคไซน์ที่แทนพาหะ
* ดัชนีการมอดูเลตทำให้เฟสแปรผันมากขึ้นหรือน้อยลงตามพฤติกรรมของสัญญาณเบสแบนด์
* ผลกระทบโดเมนความถี่ของการมอดูเลตเฟสนั้นคล้ายกับผลของการมอดูเลตความถี่
* การปรับเฟสแบบอะนาล็อกไม่เป็นเรื่องปกติ อย่างไรก็ตามการปรับเฟสดิจิตอลใช้กันอย่างแพร่หลาย
