
หมวดหมู่สินค้า
- FM Transmitter
- 0-50w 50w-1000w 2kw-10kw 10kw +
- เครื่องส่งสัญญาณโทรทัศน์
- 0-50w 50-1kw 2kw-10kw
- เสาอากาศ FM
- เสาอากาศทีวี
- อุปกรณ์เสริมเสาอากาศ
- สายเคเบิล เชื่อมต่อ เพาเวอร์ Splitter โหลด dummy
- RF ทรานซิสเตอร์
- พาวเวอร์ซัพพลาย
- อุปกรณ์เครื่องเสียง
- DTV Front End อุปกรณ์
- ระบบการเชื่อมโยง
- ระบบ STL เชื่อมโยงระบบไมโครเวฟ
- วิทยุเอฟเอ็ม
- เครื่องวัดพลังงาน
- ผลิตภัณฑ์อื่น
- พิเศษสำหรับ Coronavirus
ผลิตภัณฑ์แท็ก
ไซต์ Fmuser
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> แอฟริคานส์
- sq.fmuser.net -> แอลเบเนีย
- ar.fmuser.net -> ภาษาอาหรับ
- hy.fmuser.net -> อาร์เมเนีย
- az.fmuser.net -> อาเซอร์ไบจัน
- eu.fmuser.net -> บาสก์
- be.fmuser.net -> เบลารุส
- bg.fmuser.net -> บัลแกเรีย
- ca.fmuser.net -> คาตาลัน
- zh-CN.fmuser.net -> ภาษาจีน (ประยุกต์)
- zh-TW.fmuser.net -> ภาษาจีน (ดั้งเดิม)
- hr.fmuser.net -> โครเอเชีย
- cs.fmuser.net -> เช็ก
- da.fmuser.net -> เดนมาร์ก
- nl.fmuser.net -> ดัตช์
- et.fmuser.net -> เอสโตเนีย
- tl.fmuser.net -> ฟิลิปปินส์
- fi.fmuser.net -> ฟินแลนด์
- fr.fmuser.net -> ฝรั่งเศส
- gl.fmuser.net -> กาลิเซีย
- ka.fmuser.net -> จอร์เจีย
- de.fmuser.net -> เยอรมัน
- el.fmuser.net -> กรีก
- ht.fmuser.net -> ชาวเฮติครีโอล
- iw.fmuser.net -> ภาษาฮิบรู
- hi.fmuser.net -> ภาษาฮินดี
- hu.fmuser.net -> ฮังการี
- is.fmuser.net -> ไอซ์แลนด์
- id.fmuser.net -> ชาวอินโดนีเซีย
- ga.fmuser.net -> ไอริช
- it.fmuser.net -> อิตาเลี่ยน
- ja.fmuser.net -> ภาษาญี่ปุ่น
- ko.fmuser.net -> ภาษาเกาหลี
- lv.fmuser.net -> ลัตเวีย
- lt.fmuser.net -> ลิทัวเนีย
- mk.fmuser.net -> มาซิโดเนีย
- ms.fmuser.net -> มาเลย์
- mt.fmuser.net -> มอลตา
- no.fmuser.net -> นอร์เวย์
- fa.fmuser.net -> เปอร์เซีย
- pl.fmuser.net -> โปแลนด์
- pt.fmuser.net -> โปรตุเกส
- ro.fmuser.net -> โรมาเนีย
- ru.fmuser.net -> รัสเซีย
- sr.fmuser.net -> เซอร์เบีย
- sk.fmuser.net -> สโลวัก
- sl.fmuser.net -> สโลวีเนีย
- es.fmuser.net -> สเปน
- sw.fmuser.net -> ภาษาสวาฮิลี
- sv.fmuser.net -> สวีเดน
- th.fmuser.net -> ไทย
- tr.fmuser.net -> ตุรกี
- uk.fmuser.net -> ยูเครน
- ur.fmuser.net -> ภาษาอูรดู
- vi.fmuser.net -> เวียดนาม
- cy.fmuser.net -> เวลส์
- yi.fmuser.net -> ยิดดิช
การปรับคลื่นใน RF: ทฤษฎี, โดเมนเวลา, โดเมนความถี่

"Radio frequency (RF) คืออัตราการแกว่งของกระแสไฟฟ้าหรือแรงดันไฟฟ้าสลับหรือของสนามแม่เหล็ก, ไฟฟ้าหรือสนามแม่เหล็กไฟฟ้าหรือระบบกลไกในช่วงความถี่จากประมาณ 20 kHz ถึงประมาณ 300 GHz ----- FMUSER"
● การปรับคลื่นความถี่วิทยุ
● คณิตศาสตร์
● โดเมนเวลา
● สรุป
การปรับคลื่นความถี่วิทยุ
เรียนรู้เกี่ยวกับวิธีการเข้ารหัสข้อมูลที่ตรงไปตรงมาที่สุดในรูปแบบของคลื่นพาหะ
เราได้เห็นแล้วว่าการปรับคลื่นความถี่วิทยุเป็นเพียงการดัดแปลงโดยเจตนาของแอมพลิจูดความถี่หรือเฟสของสัญญาณพาหะไซน์ การปรับเปลี่ยนนี้ดำเนินการตามรูปแบบเฉพาะที่นำไปใช้โดยตัวส่งสัญญาณและผู้รับเข้าใจ การปรับแอมพลิจูด - ซึ่งแน่นอนว่าเป็นต้นกำเนิดของคำว่า "วิทยุ AM" - เปลี่ยนความกว้างของสัญญาณพาหะตามค่าของสัญญาณเบสแบนด์ทันที
คณิตศาสตร์
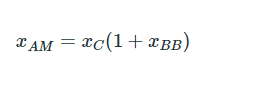
ความสัมพันธ์ทางคณิตศาสตร์สำหรับการมอดูเลตแอมพลิจูดนั้นง่ายและใช้งานง่าย: คุณคูณพาหะด้วยสัญญาณเบสแบนด์ ความถี่ของตัวพาจะไม่เปลี่ยนแปลง แต่แอมพลิจูดจะแตกต่างกันไปตามค่าเบสแบนด์ (อย่างไรก็ตามอย่างที่เราจะเห็นในภายหลังการเปลี่ยนแปลงของแอมพลิจูดจะนำเสนอคุณสมบัติความถี่ใหม่) รายละเอียดที่ละเอียดอ่อนนี่คือความต้องการเปลี่ยนสัญญาณเบสแบนด์ เราพูดถึงเรื่องนี้ในหน้าก่อนหน้า หากเรามีรูปแบบคลื่นเบสแบนด์ที่แตกต่างกันระหว่าง –1 และ +1 ความสัมพันธ์ทางคณิตศาสตร์สามารถแสดงได้ดังนี้:
ดูเพิ่มเติมที่: >>อะไรคือความแตกต่างระหว่าง AM และ FM Radio?
โดยที่ xAM เป็นรูปคลื่นสัญญาณที่ปรับความแรงได้, xC เป็นพาหะและ xBB เป็นสัญญาณเบสแบนด์ เราสามารถทำขั้นตอนนี้ต่อไปได้หากเราพิจารณาผู้ให้บริการว่าเป็นไซน์ไซด์ความถี่คงที่ไม่มีที่สิ้นสุด หากเราสมมติว่าแอมพลิจูดของแอมพลิจูดคือ 1 เราสามารถแทนที่ xC ด้วย sin (ωCt)

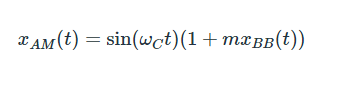
ยกตัวอย่างเช่นเราไม่สามารถออกแบบระบบที่การเปลี่ยนแปลงเล็กน้อยในค่าเบสแบนด์จะสร้างการเปลี่ยนแปลงขนาดใหญ่ในแอมพลิจูดของผู้ให้บริการ เพื่อแก้ไขข้อ จำกัด นี้เราแนะนำ m ซึ่งรู้จักกันในชื่อการมอดูเลตดัชนี
ดูเพิ่มเติมที่: >>วิธีการกำจัดเสียงรบกวนในนรับ FM
ตอนนี้ด้วยการเปลี่ยนแปลง m เราสามารถควบคุมความเข้มของผลของสัญญาณเบสแบนด์ต่อแอมพลิจูดของพาหะ อย่างไรก็ตามขอให้สังเกตว่า m ถูกคูณด้วยสัญญาณเบสแบนด์ดั้งเดิมไม่ใช่เบสแบนด์ที่เลื่อน
ดังนั้นหาก xBB ขยายจาก –1 ถึง +1 ค่าใด ๆ ของ m ที่มากกว่า 1 จะทำให้ (1 + mxBB) ขยายไปยังส่วนลบของแกน y - แต่นี่คือสิ่งที่เราพยายามหลีกเลี่ยงโดยการขยับ มันขึ้นไปในสถานที่แรก ดังนั้นโปรดจำไว้ว่าหากใช้ดัชนีการมอดูเลตสัญญาณจะต้องถูกปรับตามขนาดสูงสุดของ mxBB ไม่ใช่ xBB
โดเมนเวลา
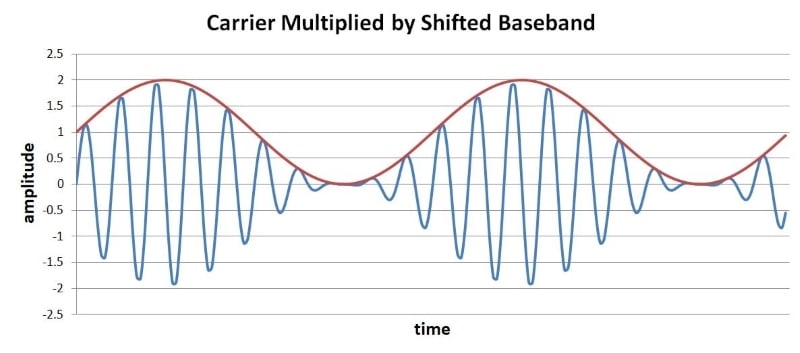
เราดูรูปคลื่นของโดเมนเวลา AM ในหน้าก่อนหน้า นี่คือพล็อตสุดท้าย (เบสแบนด์ในสีแดง, AM รูปคลื่นเป็นสีน้ำเงิน):
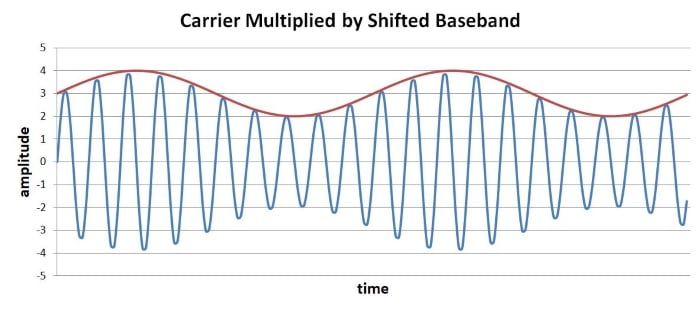
ตอนนี้เราจะรวมดัชนีการมอดูเลต เนื้อเรื่องต่อไปนี้มี m = 3
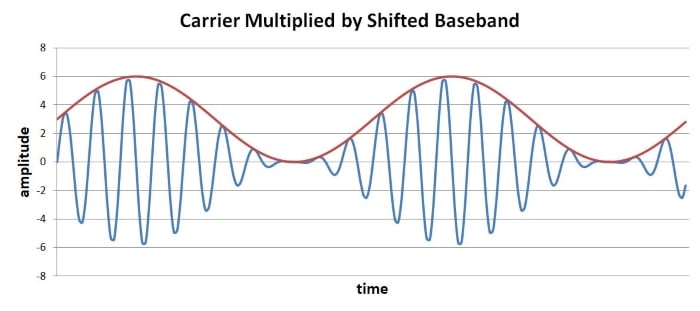
ตอนนี้แอมพลิจูดของผู้ให้บริการนั้น“ อ่อนไหวมากขึ้น” ต่อค่าที่แตกต่างของสัญญาณเบสแบนด์ เบสแบนด์แบบเลื่อนไม่ได้เข้าไปในส่วนลบของแกน y เพราะฉันเลือก DC ออฟเซ็ตตามดัชนีการมอดูเลต
คุณอาจสงสัยเกี่ยวกับบางสิ่ง: เราจะเลือก DC ออฟเซ็ตที่ถูกต้องได้อย่างไรโดยไม่ทราบถึงลักษณะแอมพลิจูดที่แน่นอนของสัญญาณเบสแบนด์ กล่าวอีกนัยหนึ่งเราจะมั่นใจได้อย่างไรว่าการแกว่งตัวเชิงลบของสัญญาณแบนด์แบนด์ขยายเป็นศูนย์ได้อย่างแน่นอน
คำตอบ: คุณไม่จำเป็นต้อง สองแปลงก่อนหน้านี้เป็นรูปคลื่น AM ที่ถูกต้องเท่ากัน สัญญาณเบสแบนด์จะถูกถ่ายโอนอย่างซื่อสัตย์ในทั้งสองกรณี DC ออฟเซ็ตใด ๆ ที่ยังคงอยู่หลังจาก demodulation ถูกลบออกอย่างง่ายดายโดยตัวเก็บประจุแบบอนุกรม (บทต่อไปจะครอบคลุม demodulation)
ดูเพิ่มเติมที่: >>ความแตกต่างระหว่าง AM และ FM คืออะไร?
ดังที่เราได้กล่าวก่อนหน้านี้การพัฒนา RF ใช้การวิเคราะห์โดเมนความถี่อย่างกว้างขวาง เราสามารถตรวจสอบและประเมินสัญญาณมอดูเลตในชีวิตจริงโดยการวัดด้วยเครื่องวิเคราะห์สเปกตรัม แต่นี่หมายความว่าเราจำเป็นต้องรู้ว่าสเปกตรัมควรมีลักษณะอย่างไร
เริ่มต้นด้วยการแสดงโดเมนความถี่ของสัญญาณพาหะ:
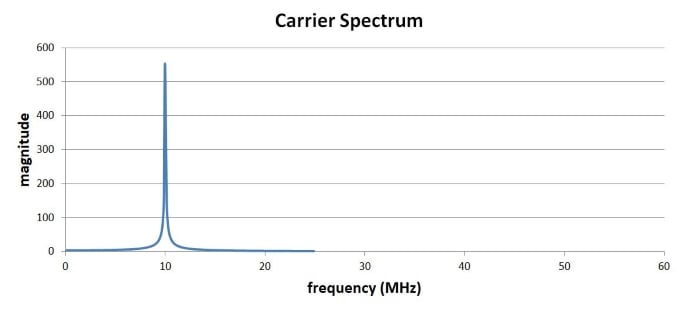
นี่คือสิ่งที่เราคาดหวังสำหรับผู้ให้บริการที่ไม่มีการปรับแต่ง: เข็มเดียวที่ 10 MHz ทีนี้เรามาดูสเปกตรัมของสัญญาณที่สร้างขึ้นโดยแอมพลิจูดเลตเตอร์ไซน์ด้วยความถี่คงที่ 1 MHz ไซนัส
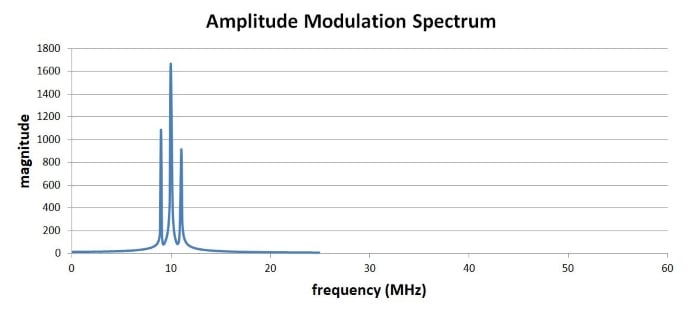
คุณจะเห็นลักษณะมาตรฐานของรูปคลื่นที่ปรับความกว้างได้: สัญญาณเบสแบนด์ได้รับการเลื่อนตามความถี่ของพาหะ
ดูเพิ่มเติมที่: >>RF กรองข้อมูลเบื้องต้นเกี่ยวกับการสอน
คุณอาจคิดว่านี่เป็นการ“ เพิ่ม” เบสแบนด์ความถี่ลงบนสัญญาณพาหะซึ่งเป็นสิ่งที่เรากำลังทำเมื่อเราใช้แอมพลิจูดมอดูเลต - ความถี่พาหะยังคงอยู่อย่างที่คุณเห็นในรูปคลื่นโดเมนเวลา แต่ การแปรผันของแอมพลิจูดนั้นประกอบด้วยเนื้อหาความถี่ใหม่ที่สอดคล้องกับลักษณะสเปกตรัมของสัญญาณเบสแบนด์
หากเราดูอย่างใกล้ชิดกับสเปกตรัมมอดูเลตเราจะเห็นว่ายอดเขาสองใหม่คือ 1 MHz (เช่นความถี่เบสแบนด์) เหนือและ 1 MHz ต่ำกว่าความถี่พาหะ:
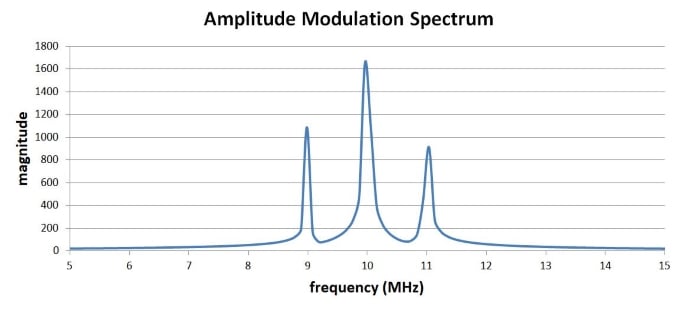
(ในกรณีที่คุณสงสัยความไม่สมดุลคือสิ่งประดิษฐ์ของกระบวนการคำนวณโดยพล็อตเหล่านี้ถูกสร้างขึ้นโดยใช้ข้อมูลจริงโดยมีความละเอียด จำกัด ขอบเขตสเปกตรัมในอุดมคติจะมีความสมมาตร)
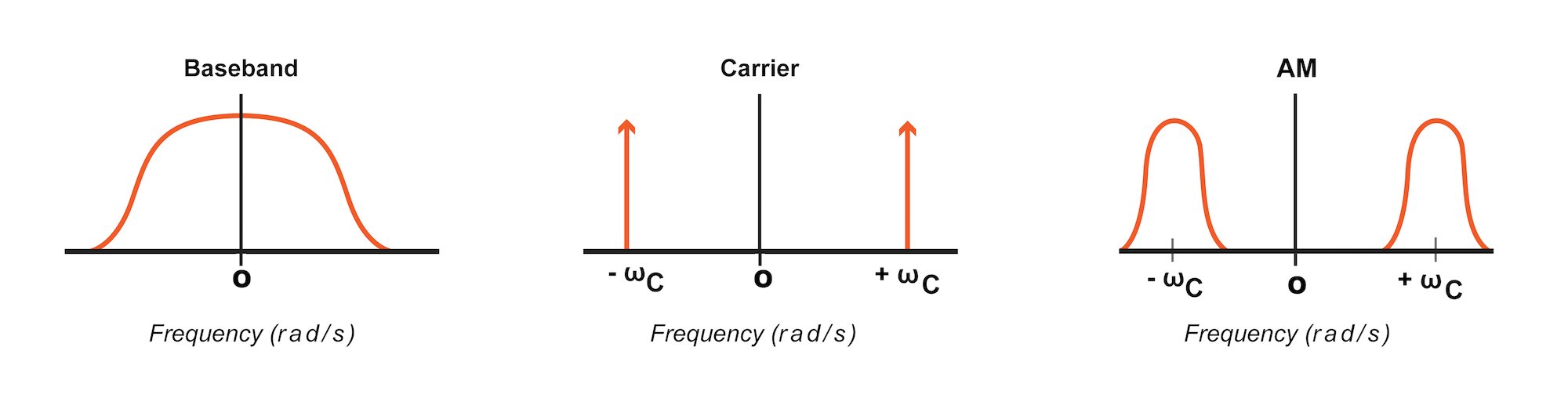
เพื่อสรุปจากนั้นการปรับความกว้างจะแปลสเปกตรัมเบสแบนด์เป็นวงความถี่ที่อยู่กึ่งกลางรอบความถี่ของตัวพา มีบางอย่างที่เราต้องอธิบายถึง: ทำไมจึงมีสองยอด - อันหนึ่งที่ความถี่พาหะบวกความถี่เบสแบนด์และอีกอันที่ความถี่พาหะลบด้วยความถี่เบสแบนด์?
คำตอบจะชัดเจนหากเราเพียงจำไว้ว่าสเปกตรัมของฟูริเยร์นั้นสมมาตรเทียบกับแกน y แม้ว่าเรามักจะแสดงเฉพาะความถี่บวก แต่ส่วนที่เป็นลบของแกน x ก็มีความถี่เชิงลบที่สอดคล้องกัน
ความถี่เชิงลบเหล่านี้จะถูกเพิกเฉยได้ง่ายเมื่อเราจัดการกับคลื่นความถี่ดั้งเดิม แต่จำเป็นที่จะต้องรวมความถี่เชิงลบเมื่อเราเปลี่ยนสเปกตรัม
แผนภาพต่อไปนี้ควรชี้แจงสถานการณ์นี้
สรุป
* การปรับแอมพลิจูดสอดคล้องกับการคูณพาหะด้วยสัญญาณเบสแบนด์ที่เลื่อน
* ดัชนีการมอดูเลตสามารถใช้เพื่อทำให้แอมพลิจูดแอมพลิจูดมากขึ้น (หรือน้อยกว่า) ความไวต่อการเปลี่ยนแปลงในค่าของสัญญาณเบสแบนด์
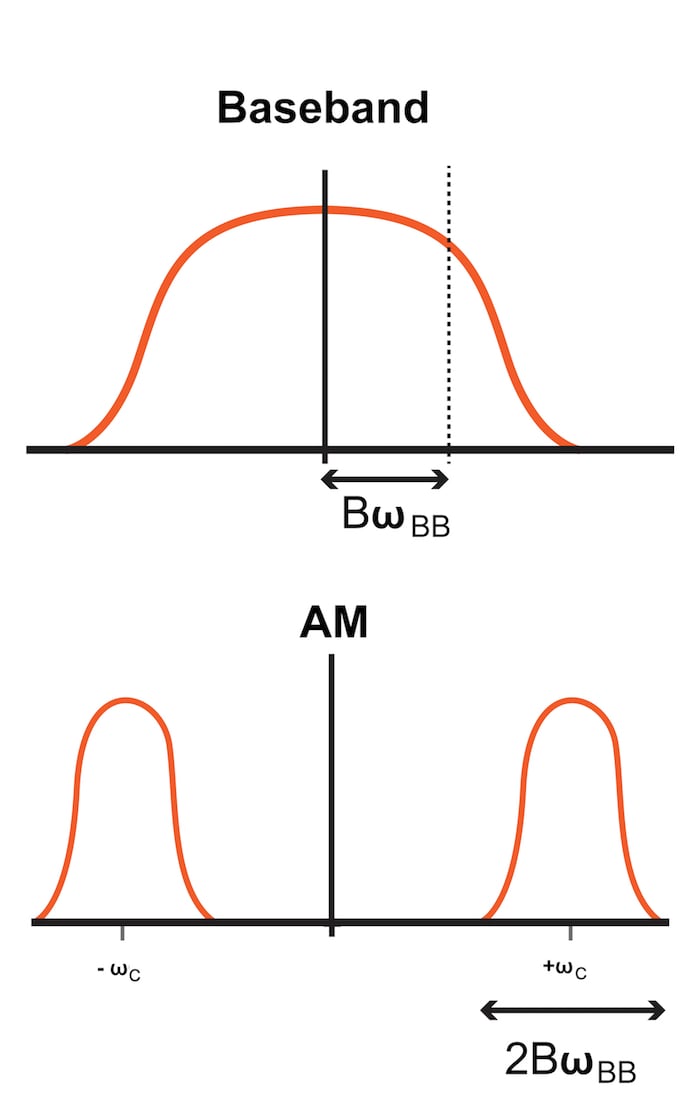
* ในโดเมนความถี่การมอดูเลตแอมพลิจูดสอดคล้องกับการแปลสเปกตรัมเบสแบนด์เป็นวงดนตรีที่ล้อมรอบความถี่พาหะ
* เนื่องจากสเปกตรัมเบสแบนด์มีความสมมาตรเทียบกับแกน y การแปลความถี่นี้ส่งผลให้แบนด์วิดท์เพิ่มขึ้น 2 เท่า
