
หมวดหมู่สินค้า
- FM Transmitter
- 0-50w 50w-1000w 2kw-10kw 10kw +
- เครื่องส่งสัญญาณโทรทัศน์
- 0-50w 50-1kw 2kw-10kw
- เสาอากาศ FM
- เสาอากาศทีวี
- อุปกรณ์เสริมเสาอากาศ
- สายเคเบิล เชื่อมต่อ เพาเวอร์ Splitter โหลด dummy
- RF ทรานซิสเตอร์
- พาวเวอร์ซัพพลาย
- อุปกรณ์เครื่องเสียง
- DTV Front End อุปกรณ์
- ระบบการเชื่อมโยง
- ระบบ STL เชื่อมโยงระบบไมโครเวฟ
- วิทยุเอฟเอ็ม
- เครื่องวัดพลังงาน
- ผลิตภัณฑ์อื่น
- พิเศษสำหรับ Coronavirus
ผลิตภัณฑ์แท็ก
ไซต์ Fmuser
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> แอฟริคานส์
- sq.fmuser.net -> แอลเบเนีย
- ar.fmuser.net -> ภาษาอาหรับ
- hy.fmuser.net -> อาร์เมเนีย
- az.fmuser.net -> อาเซอร์ไบจัน
- eu.fmuser.net -> บาสก์
- be.fmuser.net -> เบลารุส
- bg.fmuser.net -> บัลแกเรีย
- ca.fmuser.net -> คาตาลัน
- zh-CN.fmuser.net -> ภาษาจีน (ประยุกต์)
- zh-TW.fmuser.net -> ภาษาจีน (ดั้งเดิม)
- hr.fmuser.net -> โครเอเชีย
- cs.fmuser.net -> เช็ก
- da.fmuser.net -> เดนมาร์ก
- nl.fmuser.net -> ดัตช์
- et.fmuser.net -> เอสโตเนีย
- tl.fmuser.net -> ฟิลิปปินส์
- fi.fmuser.net -> ฟินแลนด์
- fr.fmuser.net -> ฝรั่งเศส
- gl.fmuser.net -> กาลิเซีย
- ka.fmuser.net -> จอร์เจีย
- de.fmuser.net -> เยอรมัน
- el.fmuser.net -> กรีก
- ht.fmuser.net -> ชาวเฮติครีโอล
- iw.fmuser.net -> ภาษาฮิบรู
- hi.fmuser.net -> ภาษาฮินดี
- hu.fmuser.net -> ฮังการี
- is.fmuser.net -> ไอซ์แลนด์
- id.fmuser.net -> ชาวอินโดนีเซีย
- ga.fmuser.net -> ไอริช
- it.fmuser.net -> อิตาเลี่ยน
- ja.fmuser.net -> ภาษาญี่ปุ่น
- ko.fmuser.net -> ภาษาเกาหลี
- lv.fmuser.net -> ลัตเวีย
- lt.fmuser.net -> ลิทัวเนีย
- mk.fmuser.net -> มาซิโดเนีย
- ms.fmuser.net -> มาเลย์
- mt.fmuser.net -> มอลตา
- no.fmuser.net -> นอร์เวย์
- fa.fmuser.net -> เปอร์เซีย
- pl.fmuser.net -> โปแลนด์
- pt.fmuser.net -> โปรตุเกส
- ro.fmuser.net -> โรมาเนีย
- ru.fmuser.net -> รัสเซีย
- sr.fmuser.net -> เซอร์เบีย
- sk.fmuser.net -> สโลวัก
- sl.fmuser.net -> สโลวีเนีย
- es.fmuser.net -> สเปน
- sw.fmuser.net -> ภาษาสวาฮิลี
- sv.fmuser.net -> สวีเดน
- th.fmuser.net -> ไทย
- tr.fmuser.net -> ตุรกี
- uk.fmuser.net -> ยูเครน
- ur.fmuser.net -> ภาษาอูรดู
- vi.fmuser.net -> เวียดนาม
- cy.fmuser.net -> เวลส์
- yi.fmuser.net -> ยิดดิช
การลบครึ่งทางคืออะไร : การทำงานและการใช้งาน, K-MAP, วงจรโดยใช้ NAND Gate
Date:2021/10/18 21:55:58 Hits:
ในการประมวลผลข้อมูลเช่นแสงหรือเสียงจากจุดหนึ่งไปยังอีกจุดหนึ่ง เราสามารถใช้วงจรแอนะล็อกโดยให้อินพุตที่เหมาะสมในรูปของสัญญาณแอนะล็อก ในกระบวนการนี้ มีโอกาสที่สัญญาณรบกวนจากอินพุตแอนะล็อกเข้ามาและอาจนำไปสู่การสูญเสียสัญญาณเอาต์พุต หมายความว่าอินพุตที่เรากำลังประมวลผลที่ระดับอินพุตไม่เท่ากับสเตจเอาต์พุต เพื่อเอาชนะวงจรดิจิทัลเหล่านี้ได้ถูกนำมาใช้ สามารถออกแบบวงจรดิจิตอลด้วยลอจิกเกต ประตูลอจิกเป็นวงจรอิเล็กทรอนิกส์ที่ดำเนินการทางตรรกะตามอินพุตและให้เอาต์พุตเพียงบิตเดียว ทั้งต่ำ (ลอจิก 0 = แรงดันศูนย์) หรือสูง (ลอจิก 1 = แรงดันไฟฟ้าสูง) วงจรเชิงผสมสามารถออกแบบได้ด้วยลอจิกเกทมากกว่าหนึ่งตัว วงจรเหล่านี้รวดเร็วและไม่ขึ้นกับเวลา ไม่มีการป้อนกลับระหว่างอินพุตและเอาต์พุต วงจรผสมมีประโยชน์สำหรับการดำเนินการทางคณิตศาสตร์และบูลีน ตัวอย่างที่ดีที่สุดของวงจรเชิงผสม ได้แก่ Half adder, full adder, half subtractor, full subtractor, multiplexers, demultiplexers, encoder และตัวถอดรหัส Half Subtractor คืออะไร Half Subtractor ตามที่กล่าวไว้ข้างต้นเป็นวงจรผสมและตามชื่อ ใช้เพื่อลบสองบิตออกจากอินพุต ที่นี่ผลลัพธ์ของตัวลบขึ้นอยู่กับอินพุตปัจจุบันอย่างหมดจดและไม่ได้ขึ้นอยู่กับขั้นตอนก่อนหน้า เอาต์พุตตัวลบครึ่งหนึ่งมีความแตกต่างและรถเข็น มันคล้ายกับการลบแบบอาร์ทิเมติก ซึ่งถ้า subtrahend มากกว่า minuend เราจะไปยืม B =1 มิฉะนั้นการยืมจะยังคงเป็นศูนย์ B=0 เพื่อให้เข้าใจได้ดีขึ้นให้เข้าสู่ตารางความจริงที่แสดงด้านล่าง 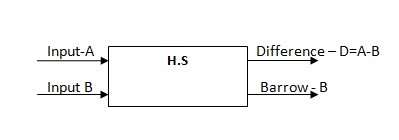 half-subtractor-block-diagram ตารางความจริง ตารางความจริงของตัวลบครึ่งตัวแสดงค่าเอาต์พุตตามอินพุตที่ใช้ในขั้นตอนอินพุต ตารางความจริงแบ่งออกเป็นสองส่วน ส่วนด้านซ้ายแสดงเป็นสเตจอินพุต และส่วนขวาแสดงเป็นสเตจเอาต์พุต ในวงจรดิจิทัล อินพุต 0 และอินพุต 1 ระบุลอจิกต่ำและลอจิกสูง ตามการกำหนดค่า ลอจิกต่ำหมายถึงแรงดันไฟฟ้าเป็นศูนย์ ลอจิกสูงหมายถึงแรงดันไฟฟ้าสูง (เช่น 5V, 7V, 12V เป็นต้น) อินพุต เอาต์พุตอินพุต – A อินพุต – BDifference -DBarrow – B 000010 1001111100 คำอธิบายตารางความจริงเมื่ออินพุต A และ B เป็นศูนย์ เอาต์พุตของตัวลบครึ่งหนึ่ง D และ B จะเป็นศูนย์เช่นกัน เมื่ออินพุต A สูงและ B เป็นศูนย์ ความแตกต่างจะเท่ากับสูง เช่น 1 และ รถเข็นเป็นศูนย์เมื่ออินพุต A เป็นศูนย์และอินพุต B สูง ผลลัพธ์ของ D และ B จะสูงตามลำดับ เมื่ออินพุตทั้งสองมีค่าสูง เอาต์พุตของตัวลบครึ่งหนึ่งทั้งคู่จะเป็นศูนย์ จากตารางความจริงข้างต้น เราสามารถ หาสมการของผลต่าง (D) และ Barrow (B) สมการสำหรับส่วนต่าง-D: ส่วนต่างสูงเมื่ออินพุต A=1, B=0 และ A=0, B=1 จากข้อความนี้ D = AB'+A'B = A⊕B ตามสมการ D มันหมายถึง Ex-or gate.D=A⊕BEquations สำหรับ Barrow-B: Barro จะสูงก็ต่อเมื่ออินพุต A ต่ำและ B สูงเท่านั้น จากจุดนี้ สมการของ Barrow B จะเป็น B= A'BB=A'B จากความแตกต่างข้างต้นและสมการสาลี่ เราสามารถออกแบบแผนภาพวงจรครึ่งตัวลบโดยใช้แผนที่ K -MapK – MapKarnaugh ช่วยลดความซับซ้อนของนิพจน์พีชคณิตแบบบูล สำหรับวงจรครึ่งตัวลบ นี่เป็นวิธีการอย่างเป็นทางการในการหาสมการพีชคณิตแบบบูลสำหรับวงจรใดๆ มาแก้นิพจน์บูลีนสำหรับวงจรครึ่งตัวลบโดยใช้ K-map.K-Map for Difference (D) และ Barrow (B)
half-subtractor-block-diagram ตารางความจริง ตารางความจริงของตัวลบครึ่งตัวแสดงค่าเอาต์พุตตามอินพุตที่ใช้ในขั้นตอนอินพุต ตารางความจริงแบ่งออกเป็นสองส่วน ส่วนด้านซ้ายแสดงเป็นสเตจอินพุต และส่วนขวาแสดงเป็นสเตจเอาต์พุต ในวงจรดิจิทัล อินพุต 0 และอินพุต 1 ระบุลอจิกต่ำและลอจิกสูง ตามการกำหนดค่า ลอจิกต่ำหมายถึงแรงดันไฟฟ้าเป็นศูนย์ ลอจิกสูงหมายถึงแรงดันไฟฟ้าสูง (เช่น 5V, 7V, 12V เป็นต้น) อินพุต เอาต์พุตอินพุต – A อินพุต – BDifference -DBarrow – B 000010 1001111100 คำอธิบายตารางความจริงเมื่ออินพุต A และ B เป็นศูนย์ เอาต์พุตของตัวลบครึ่งหนึ่ง D และ B จะเป็นศูนย์เช่นกัน เมื่ออินพุต A สูงและ B เป็นศูนย์ ความแตกต่างจะเท่ากับสูง เช่น 1 และ รถเข็นเป็นศูนย์เมื่ออินพุต A เป็นศูนย์และอินพุต B สูง ผลลัพธ์ของ D และ B จะสูงตามลำดับ เมื่ออินพุตทั้งสองมีค่าสูง เอาต์พุตของตัวลบครึ่งหนึ่งทั้งคู่จะเป็นศูนย์ จากตารางความจริงข้างต้น เราสามารถ หาสมการของผลต่าง (D) และ Barrow (B) สมการสำหรับส่วนต่าง-D: ส่วนต่างสูงเมื่ออินพุต A=1, B=0 และ A=0, B=1 จากข้อความนี้ D = AB'+A'B = A⊕B ตามสมการ D มันหมายถึง Ex-or gate.D=A⊕BEquations สำหรับ Barrow-B: Barro จะสูงก็ต่อเมื่ออินพุต A ต่ำและ B สูงเท่านั้น จากจุดนี้ สมการของ Barrow B จะเป็น B= A'BB=A'B จากความแตกต่างข้างต้นและสมการสาลี่ เราสามารถออกแบบแผนภาพวงจรครึ่งตัวลบโดยใช้แผนที่ K -MapK – MapKarnaugh ช่วยลดความซับซ้อนของนิพจน์พีชคณิตแบบบูล สำหรับวงจรครึ่งตัวลบ นี่เป็นวิธีการอย่างเป็นทางการในการหาสมการพีชคณิตแบบบูลสำหรับวงจรใดๆ มาแก้นิพจน์บูลีนสำหรับวงจรครึ่งตัวลบโดยใช้ K-map.K-Map for Difference (D) และ Barrow (B)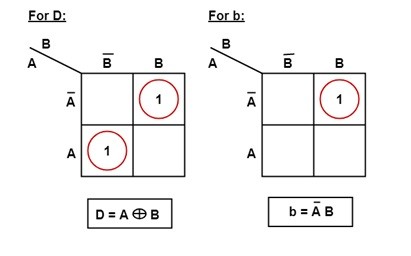 K-map for Difference (D) และ Barrow (B) ตาม K-map implicant แรกคือ A'B และ Implicant ที่สองคือ AB' เมื่อเราทำให้สมการ implicant ทั้งสองนี้ง่ายขึ้น จะได้สมการง่าย ๆ สำหรับผลต่างของ DD =A'B+AB'จากนั้น D=A⊕B สมการนี้เป็นเพียงการระบุเกท Ex-OR ในการหานิพจน์บูลีนแบบง่ายสำหรับรถเข็น B เราจำเป็นต้องทำตามขั้นตอนเดียวกันกับที่เราติดตามสำหรับความแตกต่าง D ดังนั้น B=A'B.Half Subtractor โดยใช้เกต NAND GatesNAND และ ประตู NOR เรียกว่าประตูสากล ในที่นี้ NAND gate ถูกเรียกว่า universal gate เพราะเราสามารถออกแบบวงจรดิจิตอลประเภทใดก็ได้โดยใช้ NAND gate รวมกัน n จำนวน เนื่องจากความพิเศษนี้ ประตู NAND จึงถูกเรียกว่าประตูสากล ตอนนี้เราออกแบบวงจร half-subtractor โดยใช้เกท NAND
K-map for Difference (D) และ Barrow (B) ตาม K-map implicant แรกคือ A'B และ Implicant ที่สองคือ AB' เมื่อเราทำให้สมการ implicant ทั้งสองนี้ง่ายขึ้น จะได้สมการง่าย ๆ สำหรับผลต่างของ DD =A'B+AB'จากนั้น D=A⊕B สมการนี้เป็นเพียงการระบุเกท Ex-OR ในการหานิพจน์บูลีนแบบง่ายสำหรับรถเข็น B เราจำเป็นต้องทำตามขั้นตอนเดียวกันกับที่เราติดตามสำหรับความแตกต่าง D ดังนั้น B=A'B.Half Subtractor โดยใช้เกต NAND GatesNAND และ ประตู NOR เรียกว่าประตูสากล ในที่นี้ NAND gate ถูกเรียกว่า universal gate เพราะเราสามารถออกแบบวงจรดิจิตอลประเภทใดก็ได้โดยใช้ NAND gate รวมกัน n จำนวน เนื่องจากความพิเศษนี้ ประตู NAND จึงถูกเรียกว่าประตูสากล ตอนนี้เราออกแบบวงจร half-subtractor โดยใช้เกท NAND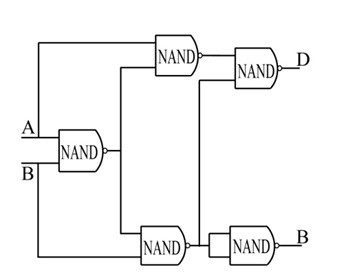 half-subtractor-implemented-with-NAND-gates เราสามารถออกแบบวงจร half-subtractor ที่มีประตู NAND ห้าช่อง พิจารณา A และ B เป็นอินพุตสำหรับขั้นตอนแรกของเกต NAND เอาต์พุตจะเชื่อมต่ออีกครั้งเป็นอินพุตเดียวไปยังเกต NAND ที่สอง เช่นเดียวกับเกต NAND ที่สาม ตามอินพุตของพวกเขาจะให้เอาต์พุตและในขั้นตอนสุดท้ายจากเกต NAND เอาต์พุตที่แตกต่าง D และเอาต์พุตรถเข็น B จะอยู่ที่เอาต์พุต สมการเอาต์พุต D ความแตกต่างสุดท้ายคือ D = A ⊕B และสมการรถเข็น B เป็น B=A'B โดยการใช้เกท NAND ร่วมกันเพื่อสร้างตัวลบครึ่งหนึ่ง สมการสุดท้ายของความแตกต่างและรถเข็นจะเป็น D= A⊕B และ B=A'B เท่านั้น ของ Half Subtractor มีการใช้งานที่หลากหลายของตัวลบเหล่านี้ ในทางปฏิบัตินั้นง่ายต่อการวิเคราะห์ บางส่วนมีการระบุไว้ดังต่อไปนี้ หากต้องการลบตัวเลขที่อยู่ในตำแหน่งน้อยที่สุดในคอลัมน์ ควรใช้ตัวลบเหล่านี้ หน่วยเลขคณิตและลอจิก (ALU) ที่มีอยู่ในโปรเซสเซอร์ชอบหน่วยนี้สำหรับการลบเพื่อลดความผิดเพี้ยนในเสียง สิ่งเหล่านี้ถูกใช้ ขึ้นอยู่กับการทำงานที่ต้องการ ตัวลบครึ่งหนึ่งมีความสามารถในการเพิ่มหรือลดจำนวนตัวดำเนินการ ตัวลบครึ่งตัวถูกใช้ในแอมพลิฟายเออร์ ในขณะที่ส่งสัญญาณเสียง สิ่งเหล่านี้ถูกใช้เพื่อหลีกเลี่ยงการบิดเบือน ดังนั้น ทั้งหมดนี้เป็นเรื่องเกี่ยวกับ วงจรลบครึ่ง ในสภาวะเรียลไทม์การลบจำนวนบิตหลาย ๆ บิตไม่สามารถทำได้โดยใช้ตัวลบครึ่งตัว ข้อเสียเปรียบนี้สามารถเอาชนะได้โดยใช้ตัวลบแบบเต็ม
half-subtractor-implemented-with-NAND-gates เราสามารถออกแบบวงจร half-subtractor ที่มีประตู NAND ห้าช่อง พิจารณา A และ B เป็นอินพุตสำหรับขั้นตอนแรกของเกต NAND เอาต์พุตจะเชื่อมต่ออีกครั้งเป็นอินพุตเดียวไปยังเกต NAND ที่สอง เช่นเดียวกับเกต NAND ที่สาม ตามอินพุตของพวกเขาจะให้เอาต์พุตและในขั้นตอนสุดท้ายจากเกต NAND เอาต์พุตที่แตกต่าง D และเอาต์พุตรถเข็น B จะอยู่ที่เอาต์พุต สมการเอาต์พุต D ความแตกต่างสุดท้ายคือ D = A ⊕B และสมการรถเข็น B เป็น B=A'B โดยการใช้เกท NAND ร่วมกันเพื่อสร้างตัวลบครึ่งหนึ่ง สมการสุดท้ายของความแตกต่างและรถเข็นจะเป็น D= A⊕B และ B=A'B เท่านั้น ของ Half Subtractor มีการใช้งานที่หลากหลายของตัวลบเหล่านี้ ในทางปฏิบัตินั้นง่ายต่อการวิเคราะห์ บางส่วนมีการระบุไว้ดังต่อไปนี้ หากต้องการลบตัวเลขที่อยู่ในตำแหน่งน้อยที่สุดในคอลัมน์ ควรใช้ตัวลบเหล่านี้ หน่วยเลขคณิตและลอจิก (ALU) ที่มีอยู่ในโปรเซสเซอร์ชอบหน่วยนี้สำหรับการลบเพื่อลดความผิดเพี้ยนในเสียง สิ่งเหล่านี้ถูกใช้ ขึ้นอยู่กับการทำงานที่ต้องการ ตัวลบครึ่งหนึ่งมีความสามารถในการเพิ่มหรือลดจำนวนตัวดำเนินการ ตัวลบครึ่งตัวถูกใช้ในแอมพลิฟายเออร์ ในขณะที่ส่งสัญญาณเสียง สิ่งเหล่านี้ถูกใช้เพื่อหลีกเลี่ยงการบิดเบือน ดังนั้น ทั้งหมดนี้เป็นเรื่องเกี่ยวกับ วงจรลบครึ่ง ในสภาวะเรียลไทม์การลบจำนวนบิตหลาย ๆ บิตไม่สามารถทำได้โดยใช้ตัวลบครึ่งตัว ข้อเสียเปรียบนี้สามารถเอาชนะได้โดยใช้ตัวลบแบบเต็ม
ฝากข้อความ
รายการข้อความ
ความคิดเห็นกำลังโหลด ...
